Researcher's name
Leen Jabban
University
University of Bath
Supervisor's name Benjamin Metcalfe
Project title A person-based approach to the development of Upper-limb prostheses
Outline of project
Up to 75% of myoelectric upper-limb prostheses are abandoned due to the mismatch between user needs and device performance. Not only is this wasteful, but it also results in reduced quality of life for upper-limb amputees and often leads to long-term issues related to the overuse of the intact limb [1].
Touch is vital for object manipulation and sensory feedback has the potential to improve control, increase embodiment, reduce phantom limb pain, and reduce abandonment [1]. This has driven the research on sensory feedback to include invasive technologies such as nerve stimulation. However, despite these efforts, only two high-end commercial prostheses include a basic implementation of sensory feedback (early 1900s design).
There is a heavy reliance on lab tests, leaving fundamental implementation questions unanswered. For example, what prosthesis locations are most useful to obtain force information? While the literature relies on sensation from the fingertips, our user needs work has shown that this might not be the optimal location as the fingertips are not always in touch with the object being held [2].
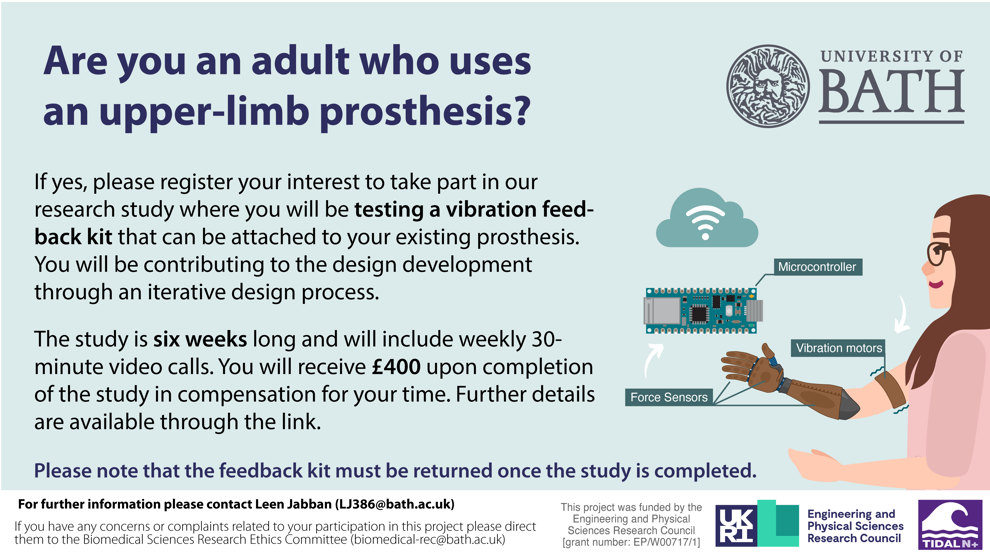
This project targets the bottleneck in the progress of sensory feedback for upper-limb prostheses through a paradigm shift. Rather than starting in the lab and inviting participants in the final stages of the process, we are developing the system with the users using a customisable system with an IoT node that the participants use at home. We are making the users active contributors in the process to implement what they think is useful.
Click here to take part https://bathreg.onlinesurveys.ac.uk/sensory-feedback-iot
Contact email
Contact number
07478404930
We can help
We are dedicated to assisting serving and ex-Service men and women who have suffered life-changing limb loss or the use of a limb, an eye or sight. We support these men and women in their communities throughout the UK. Click the link below to find out the different kinds of support we offer.
Get Support